|
型号参数
|
可接入相机数
|
相机接口类型
|
接口
|
|---|---|---|---|
|
FMC6678C
|
2~4台
|
CameraLink
|
FMC、IO、485、以太网
|
|
FMC6678G
|
2~4台
|
Gige
|
FMC、IO、485、以太网
|

|
Scout系列
|
分辨率
|
感光芯片
|
帧速率(fps)
|
功率
|
重量
|
|
scA640-70gm/gc
|
659 x 494
|
Sony ICX424
|
70
|
~3 W
|
~160 g
|
|
scA640-74gm/gc
|
659 x 494
|
Sony ICX414
|
79
|
~3 W
|
~160 g
|
|
scA640-120gm/gc
|
659 x 494
|
Sony ICX618
|
122
|
~3.5 W
|
~160 g
|
|
scA750-60gm/gc
|
752 x 480
|
Aptina MT9V022
|
64
|
~2.5 W
|
~160 g
|
|
scA780-54gm/gc
|
782 x 582
|
Sony ICX415
|
55
|
~3 W
|
~160 g
|
|
scA1000-30gm/gc
|
1034 x 779
|
Sony ICX204
|
31
|
~3 W
|
~160 g
|
|
scA1300-32gm/gc
|
1296 x 966
|
Sony ICX445
|
32
|
~3.5 W
|
~160 g
|
|
scA1390-17gm/gc
|
1392x1040
|
Sony ICX267
|
17
|
~3.5 W
|
~160 g
|
|
scA1400-17gm/gc
|
1392x1040
|
Sony ICX285
|
17
|
~3.5 W
|
~170 g
|
|
scA1400-30gm/gc
|
1392x1040
|
Sony ICX285
|
30
|
~4.2 W
|
~170 g
|
|
scA1600-14gm/gc
|
1628x1236
|
Sony ICX274
|
14
|
~3.5 W
|
~160 g
|
|
scA1600-28gm/gc
|
1628x1236
|
Sony ICX274
|
28
|
~4.3 W
|
~160 g
|
|
Ace系列
|
分辨率
|
感光芯片
|
帧速率(fps)
|
功率
|
重量
|
|
acA640-90gm/gc
|
659x494
|
Sony ICX424
|
90
|
~3.1W
|
~90g
|
|
acA640-120gm/gc
|
659x494
|
Sony ICX618
|
120
|
~2.3W
|
~90g
|
|
acA645-100gm/gc
|
659x494
|
Sony ICX414
|
100
|
~3.6W
|
~90g
|
|
acA750-30gm/gc
|
752x580
|
Sony ICX409
|
30
|
~2.5W
|
~90g
|
|
acA780-75gm/gc
|
782x582
|
Sony ICX415
|
60
|
~3.6W
|
~90g
|
|
acA1280-60gm/gc
|
1280x1024
|
EV76C560
|
60
|
~2.5W
|
~90g
|
|
acA1300-22gm/gc
|
1296x966
|
Sony ICX445
|
22
|
~2.2W
|
~90g
|
|
acA1300-30gm/gc
|
1296x966
|
Sony ICX445
|
30
|
<3.0W
|
~90g
|
|
acA1300-60gm/gc
|
1280x1024
|
EV76C560
|
60
|
<3.0W
|
~90g
|
|
acA1300-60gm NIR
|
1280x1024
|
EV76C661
|
60
|
<3.0W
|
~90g
|
|
acA1600-20gm/gc
|
1628x1236
|
Sony ICX274
|
20
|
~3.4W
|
~90g
|
|
acA1600-60gm/gc
|
1600x1200
|
EV76C570
|
60
|
<3.0W
|
~90g
|
|
acA1920-25gm/gc
|
1920x1088
|
Aptina MT9P031
|
25
|
~2.2W
|
~90g
|
|
acA2000-50gm/gc
|
2048x1088
|
CMOSIS CMV2000
|
50
|
~3.4W
|
~90g
|
|
acA2000-50gm/gc NIR
|
2048x1088
|
CMOSIS CMV2000 NIR增强型
|
50
|
~3.4W
|
~90g
|
|
acA2040-25gm/gc
|
2048x2048
|
CMOSIS CMV4000
|
25
|
~3.4W
|
~90g
|
|
acA2040-25gm/gc NIR
|
2048x2048
|
CMOSIS CMV4000 NIR增强型
|
25
|
~3.4W
|
~90g
|
|
acA2500-14gm/gc
|
2592x1944
|
Aptina MT9P
|
14
|
~2.5W
|
~90g
|
|
Pilot系列
|
分辨率
|
感光芯片
|
帧速率(fps)
|
功率
|
重量
|
|
piA640-210gm/gc
|
648 x 488
|
Kodak KAI-0340
|
210
|
~5.5W
|
220g
|
|
piA1000-48gm/gc
|
1004 x 1004
|
Kodak KAI-1020
|
48
|
||
|
piA1000-60gm/gc
|
1004 x 1004
|
Kodak KAI-1020
|
60
|
||
|
piA1600-35gm/gc
|
1608 x 1208
|
Kodak KAI-2020
|
35
|
||
|
piA1900-32gm/gc
|
1928 x 1084
|
Kodak KAI-2093
|
32
|
||
|
piA2400-17gm/gc
|
2456 x 2058
|
Sony ICX625
|
17
|
|
板卡类型
对比项目 |
TI 开发板EVM (TMDSEVM6678)
|
我们设计的板卡 (FMC6678)
|
|
应用场合
|
是一块Demo板,只能主要用于C6678的学习和性能评估; 不适合严苛工业环境下的产品应用。 |
用于高校和研究所参考学习和视觉图像类项目; 批量用于工业视觉产品,替代工控机或其他DSP板。 |
|
可靠设计
|
对外总线的AMC接口、电源插座的Phone Jacks,不具备抗震动能力; | 对外总线的FMC接口、电源插座是带螺丝固定的紧耦合接口,具备优越的抗震动能力。 |
|
电源设计
|
(1)SmartReflex: CVDD和VCC1V0由UCD9244和UCD7242产生,同时还需要增加一个温度传感器,芯片引脚够多且电路为复杂,还需要软件配置,为严重的问题是因为输出电流不能大于10A,只能用于1GHz的TMS320C6678芯片。 (2)其他辅助电源均采用分离芯片搭建,占用板卡面积较大,且稳定性受到影响。 |
(1)SmartReflex: CVDD和VCC1V0采用模拟设计,由LM10011和外置Mosfet管产生, 芯片引脚少,无须编程配置,同时输出电流可达15A,能用于1.25 GHz的TMS320C6678芯片。 (2)其他辅助电源均采用TI的模块化电源,结构紧凑、稳定可靠。 |
|
调试接口
|
只有60-pin JTAG Emulator Header | 同时具有60-pin JTAG Emulator Header和20-pin JTAG Header。 支持合众达、Blackhawk、闻亭等国内外各类仿真器。 |
|
对外总线
|
AMC接口: 4线SRIO 2.1-5Gbaud Per Lane全双工。2线PCIe Gen2-5Gbaud Per Lane全双工。1路 SGMII 接口, 24线TDM 接口。 JTAG调试接口。 MMC接口。 |
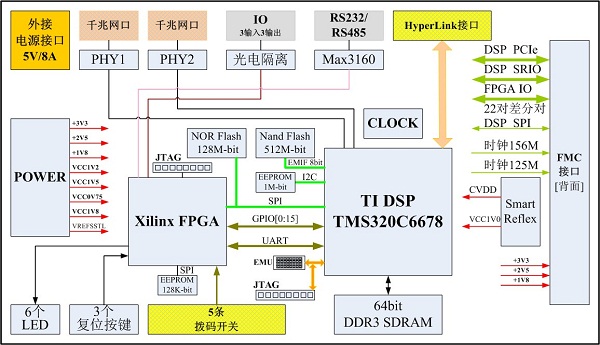
FMC接口: 4线SRIO 2.1-5Gbaud Per Lane全双工。2线PCIe Gen2-5Gbaud Per Lane全双工。22对差分对扩展线。1路SPI接口。2对差分时钟线。可扩展4路千兆网相机接口和4路Camera-Link相机接口。 |
|
网络接口
|
1路RJ45 | 2路RJ45:可接入双相机;或者一路接相机另外一路与PC通讯。 |
|
网络协议
|
NDK,占有高的CPU,带宽有限,不支持双网口。 | LWIP:占用CPU资源少,速度快,可支持双网口。 |
|
通用接口
|
串口等对外通用接口不符合工业标准。 | 具有RS232/RS485兼容端口,用DB9端子;3路带光耦隔离的输入接口;3路带光耦隔离的输出接口。 |
|
启动实现
|
IBL程序与EEPROM存储器中,上电启动后IBL拷贝FLASH(Nor或Nand)的主程序开始运行。 | 与开发板完全兼容。 |
|
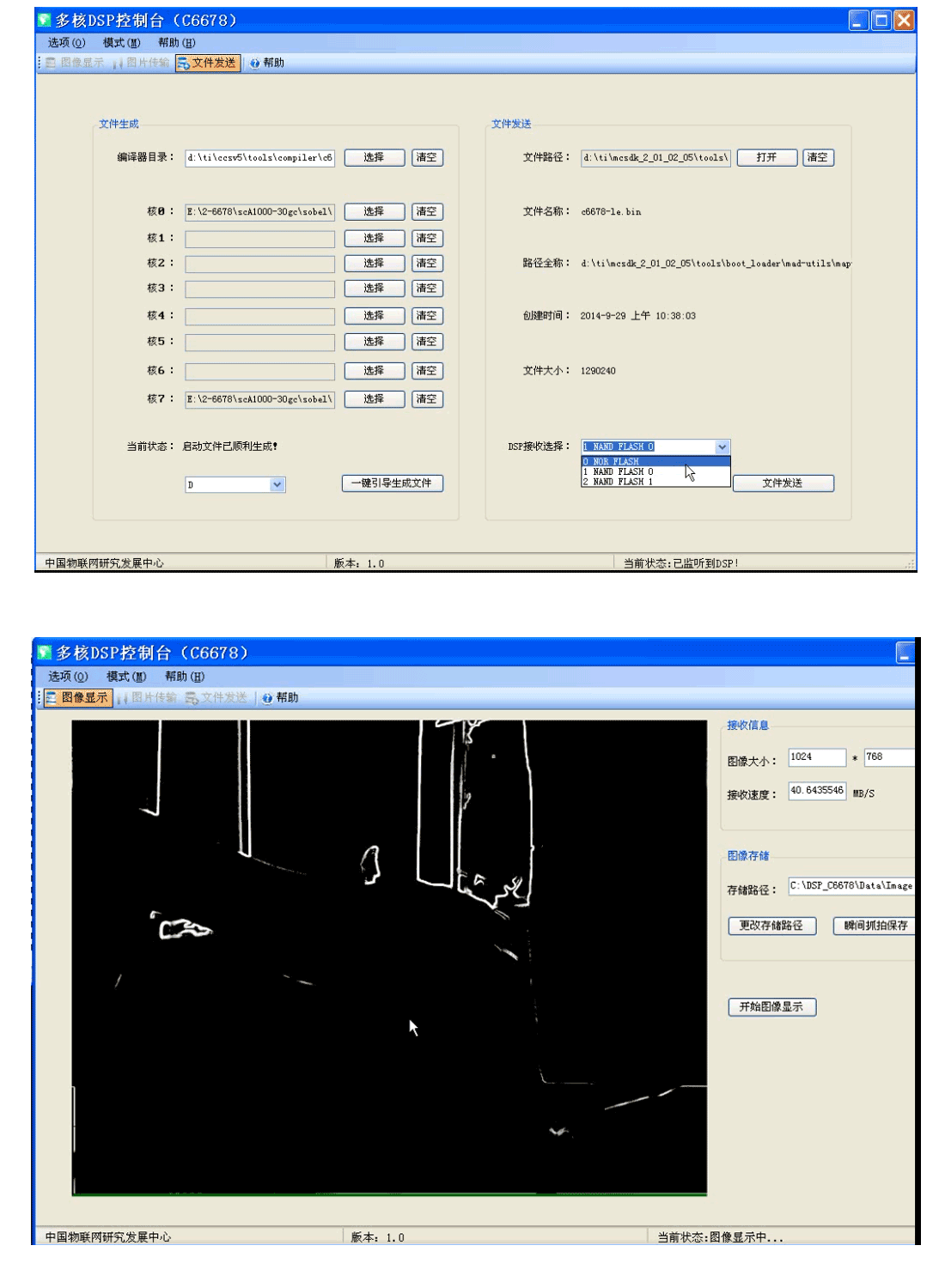
程序烧写
|
将应用程序的.out文件经过一系列转换为.bin文件,如果是多核程序,需要进行资源分配、存储区域划分等操作,然后组合层一个新文件,后用仿真器烧写。 | 只需在我们自主设计的PC客户端点击选中每个核的.out文件,然后一键自动完成文件转换、文件打包和文件烧写,无须使用仿真器。 |
|
多核调度
|
提供了几个简单LPC调度例程,注释和说明文档较少,理解难度大。 | 提供面向实战的多核调度例程,并提供文档《面向多相机接入的TMS320C6678图像处理系统软件开发说明》,重点介绍了OpenMP的使用。 |
|
图像例程
|
提供了一个简单的Sobel边缘提取的例程。注释和说明文档较少,理解难度大。 | 提供三个典型应用的图像例程,技术内容涉及缺陷检测、条码识别、视觉定位,编程实现涉及任务分配、任务并行、数据并行、多核调度、TI ImgLib库使用等,并提供《面向多相机接入的TMS320C6678图像处理系统算法开发例程》说明文件。 |
|
结论:我们的FMC6678图像处理板卡 (1)适合工业视觉领域的产品级大批量应用。 (2)让TMS320C6678的开发从此变得简单。 |
||
|
板卡类型
对比项目 |
工控机/ 工业计算机
|
我们设计的板卡FMC6678
|
|
CPU性能
|
一般采用Intel® Core™ i3/ i5/ i7,以Core i5-3610ME为例说明: 2个核4线程,每个核2.7GHz; 3 MB缓存; DDR3/DDR3L 1333/1600。 |
8个TMS320C66x DSP核心,每核为 1.00 GHz and 1.25GHz; 320GMAC/160 GFLOP @ 1.25GHz。 32KB L1P, 32KB L1D, 512KB L2 Per Core;4MB Shared L2; 64位DDR3-1600。 |
|
体积
|
4U/6U 体积庞大 | 140mm×80mm,比手掌稍微大些 |
|
功耗
|
≥30W | ≤15W |
|
外设扩展
|
需要外接扩展卡,降低了稳定性。 | 板上自带多种外设,无须外扩。 |
|
操作系统
|
Windows,Linux | SYS/BIOS |
|
对1024×768图像Sobel边缘提取
|
调用OPenCV函数,计算时间为2ms。 | 调用TI自带的ImgLib图像算法库函数,计算时间为6ms,经优化后计算时间可缩短为0.5ms。 |
|
结论:我们的FMC6678图像处理板卡 (1)适合用于体积、功耗及稳定性要求高的环境。 (2)超强运行能力让DSP可普及用于工业视觉领域。 |
||
|
类别
|
用途
|
装箱配件
|
|
DEMO板
|
与TI原装开发板类似,用于学习和评估TMS320C6678。 | FMC6678板卡一块;12V/5A DC电源一个; 带扣网线一条;串口线一条;U盘一个(内有TI安装文件,可一键安装建立开发环境,自主编写的上位机管理软件,详细的软硬件使用说明文档,驱动和例程可从TI官网下载) |
|
视觉处理版
|
用户可在板卡上实现Gige/CameraLink相机的图像输入、图像算法处理,以及结果输出等功能,实现视觉产品的快速开发。 | 在上述基础上,增加: 图像系统软件开发框架,用环形缓冲区可流程化实现图像的输入、处理和输出;三个基于OpenMP的图像算法例程,具参考价值;提供 Basler Gige相机的驱动软件包,可控制相机并接入图像;提供LWIP双网口软件包,可调用API实现TCP、UDP通信。 |
|
系统定制版
|
为客户设计个性化视觉算法,直接提供完整的视觉系统。 | 在上述基础上,增加: 根据客户需求,为客户量身定制图像智能算法和硬件系统,可提供源代码、电路原理图、使用说明书等资料。 |
热门标签:
企业分站 在线客服 : 服务热线: 025-86136252 / 15062244194 电子邮箱: [email protected]
公司地址:江苏省南京市江宁区未来科技城
研维信息是一家集研发、生产、销售为一体的工控机、嵌入式安装工业平板电脑、加固手持平板电脑、加固类三防计算机的专业设备提供商,提供各种尺寸和规格的安装式工业平板电脑,手持三防平板电脑,加固三防计算机。核心研发及市场团队均有10余年的相关行业背景,尤其是公司的ODM团队,可以为客户提供快速、质优、灵活的客户定制化产品OEM及ODM服务,公司对员工及客户,都一直秉承合作共赢、以德为先的经营宗旨,为客户提供优质产品及服务,提升客户价值。